Numerical results
The Transformers for Trajectory Optimization framework is evaluated in three different test scenarios, inlcuding nonlinear dynamics and obstacle avoidance constraints:
- Autonomous Rendezvous and Proximity Operations,
- Quadrotor Control,
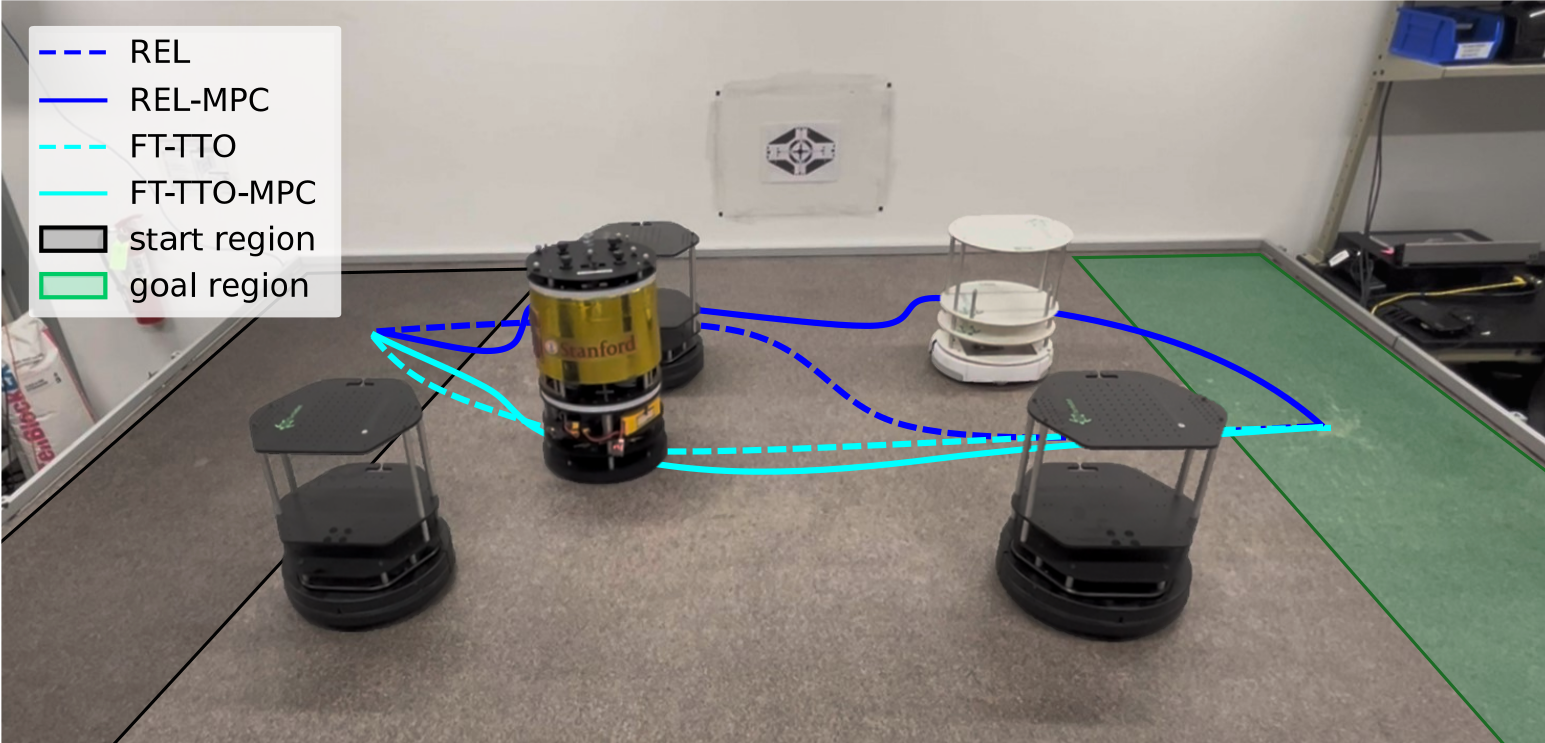
- Free Flyer Control.
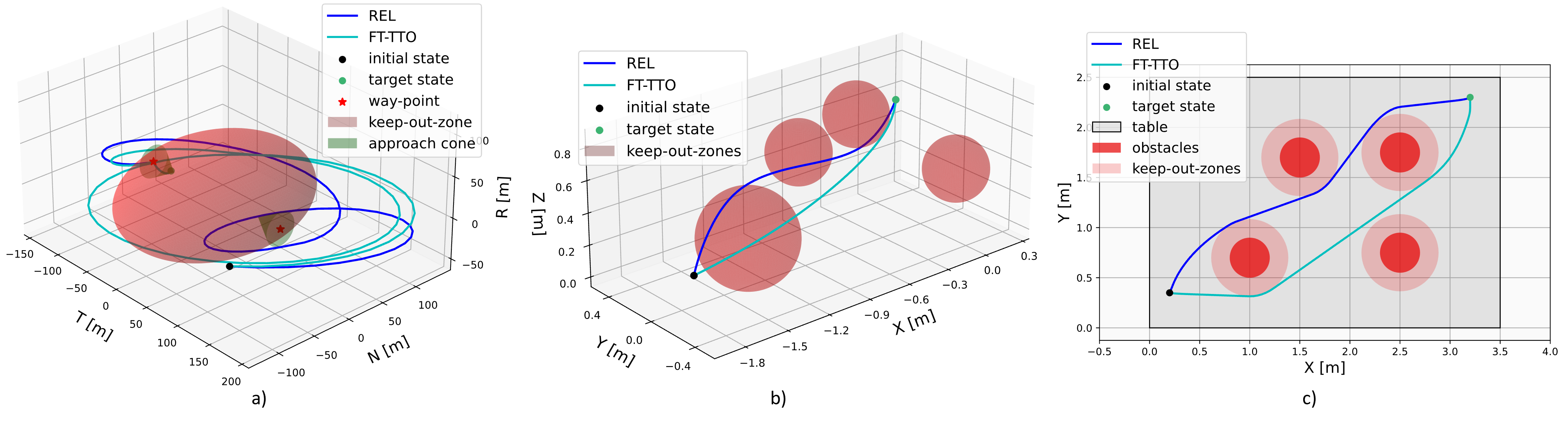
Although targeting explicitly closed-loop performance, the fine-tuning process benefits the open-loop setting, too. Warm-starting sequential optimizers with the fine-tuned transformer-based neural network (FT-TTO) increases the fuel-optimality of the planned trajectory.

In the closed-loop setting, the fine-tuning process enables FT-TTO to effectively boost MPC performance, providing a long-horizon guidance to short-horizon planning problems. FT-TTO-MPC outperforms all the baselines considered, thanks to its robustness to covariance shifts induced by the closed-loop execution.